
直击幸福现场查看《 k8.com凯发官网app下载》 点击这里查看《》



直击幸福现场查看《 k8.com凯发官网app下载》 点击这里查看《》
ROSMASTER R2是一款基于ROS机器人操作系统开发的阿克曼转向结构的移动小车,它支持Jetson系列主板和树莓派4B作为主控,并搭载了运动控制、遥控通讯、建图导航、跟随避障、自动驾驶、人体特征动作识别亚搏手机登录主页、语音交互控制
思岚A1M8激光雷达采用三角测距的测量方式,测量半径为0.15m~12m亚搏手机登录主页,采样频率8K,结合ROS机器人系统可轻松实现室内建图和导航功能。
YDLIDAR 4RAO激光雷达采用TOF测距方式,拥有可靠的抗日能力,支持室内、室外建图导航,测量半径支持0.05m~30m测距,测量速度既快速又准确。
奥比中光AstraPro深度相机,支持手动调节俯仰角度,不仅可实现高清摄像头所有AI视觉玩法,还能实现深度图像数据处理、三维导航建图等进阶玩法。
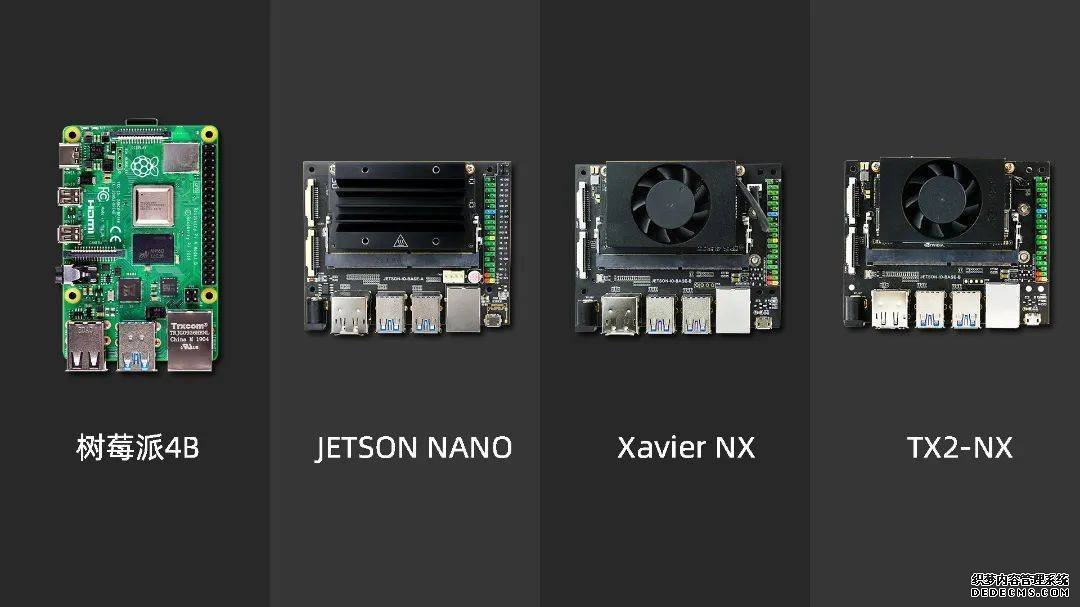
ROSMASTER R2支持树莓派与Jetson系列主控,且使用方法基本一致,均使用ubuntu系统。不同主控仅影响ROSMASTER R2小车的性能表现,我们提供的课程资料、产品功能玩法、控制软件等均一致。
阿克曼转向是一种现代汽车的转向方式,ROSMASTER R2采用铝合金阿克曼底盘结构,在R2小车转弯的时候亚搏手机登录主页,内外双轮转过的角度不一样,内侧轮胎转弯半径小于外侧轮胎转弯半径。

不仅支持iOS/安卓双系统畅玩APP控制,还提供建图导航APP,满足多场景APP控制使用。标配实景人称游戏手柄,结合手机APP,可体验身临其境的操控感。
激光雷达可实时检测周围环境,自主避开前方障碍物或实时跟随距离雷达最近目标进行运动。
运用RTAB算法将视觉与雷达融合,实现了机器人三维视觉建图和导航避障,支持全局重定位,自主定位。
ORB-SLAM2是一个支持单目、双目、RGB-D相机的开源SLAM框架,能够实时计算相机的位姿并同时对周围环境三维重建,在RGB-D模式下可以得到真实尺度信息。

ROSMASTER R2搭载了高性能语音交互模块,通过发出语音指令,可以控制小车运动状态、颜色追踪、颜色识别、自动驾驶、机械臂搬运/分拣等创意玩法,ROSMASTER具有“能听能答”的特点。
通过MediaPipe开发框架完成手部检测、姿态检测亚搏手机登录主页、整体检测、面部检测、三维检测识别等功能。
ROSMASTER配套105节ROS课程,均提供教学课程文档和中英文字幕讲解视频,手把手教您入门ROS,玩转ROS机器人应用。

TIME:24小时贴心服务
 新浪微博
新浪微博 联络 QQ
联络 QQ